01 基于动捕进行失调步态分类研究
捷克 布拉格捷克技术大学
Oldřich Vyšata, Ondřej Tupa, Aleš Procházka,
Rafael Doležal, Pavel Cejnar,Aprajita Milind Bhorkar,
Ondřej Dostál和Martin Vališ
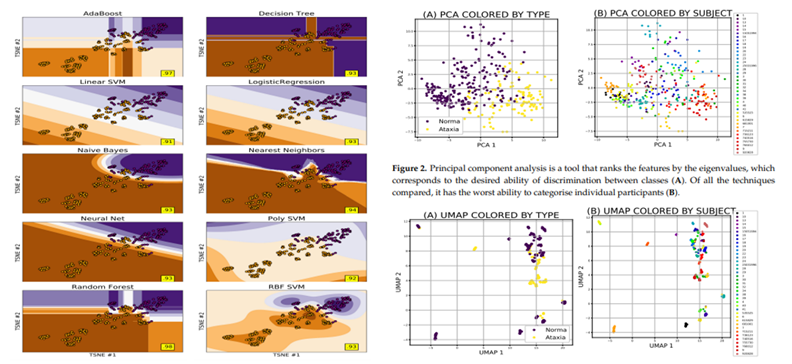
共济失调步态是病理性的一种异常步态,常与神经系统的疾病或损伤相关,其特点是步态不稳、协调性差,本研究旨在对不同类型的失调步态进行分类。作者采用诺亦腾 PN2 惯性动捕套装,从43名参与者那里,收集了大量步态数据,测试者包括患有多发性硬化症的共济失调患者和健康对照组。基于诺亦腾提供的动作数据与融合技术、人体动力学、物理引擎算法,以及对数据的多维度处理,作者提出一种全新的共济失调步态分类方法,其分类准确率高达98%,为共济失调步态的分类提供了创新思路、重要见解和实用指导。
原文链接:
https://www.mdpi.com/1424-8220/21/16/5576
02 手指与腕关节的连续运动估计研究
日本 东京工业大学
Tokyo Instituteof Technology
Zixun He、Zixuan Qin、Yasuharu Koike
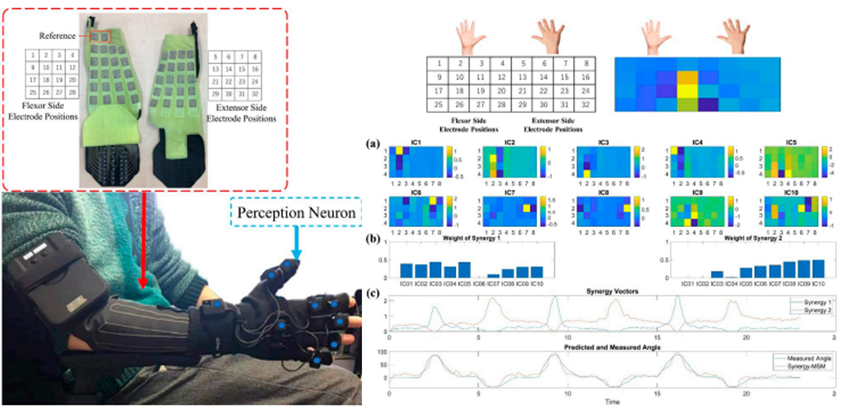
本研究利用基于肌肉协同的肌肉骨骼模型,实现了对手指和腕关节角度的连续运动估计研究。作者使用诺亦腾PN惯性动捕套装,记录了测试者的关节数据,并采用独立分析的方法对肌电信号进行分离和活跃肌肉识别。作者指出了传统肌电信号处理方法在姿势估计中的局限性,并通过应用肌肉协同理论,提出了一种基于肌肉骨骼模型的新方法,能够实时估计手指和腕关节的运动角度。实验结果表明,该方法能够准确地估计手指和腕关节的运动状态,为控制和操作手指和腕动作的应用提供了潜在的解决方案。
原文链接:
https://www.mdpi.com/2076-3417/12/8/3772
03 医疗辅助机器人的远程精确控制
中国 浙江大学
吕宏浩、孔德鹏、庞高阳、王柏村、于章伟、庞志波
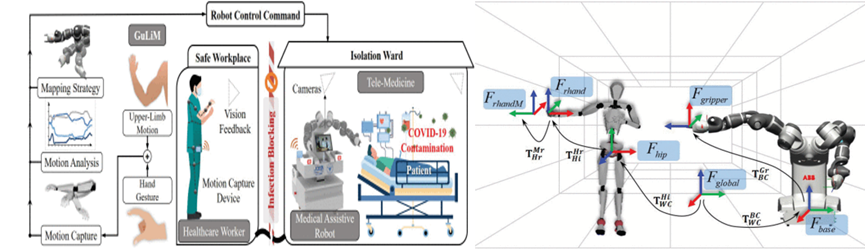
在COVID-19背景下,作者通过使用诺亦腾PN2 惯性动捕套装,实时捕捉和传输操作者上肢和手部的运动数据,并对这些数据进行处理,从而获取手部的姿势信息。实现了对远程医疗机器人的精确控制,该技术旨在减少医护人员与患者之间的直接接触,降低传染风险,可以实现更准确、自然、直观的远程机器人操作,提高远程医疗的效率和安全性。
原文链接:
https://ieeexplore.ieee.org/document/9693932