01 动捕技术远程驱动人形机器人
上海交通大学
Liang Gong, Binhao Chen, Wenbin Xu, Chengliang Liu, Xudong Li, Zelin Zhao and Lujie Zhao
由于物理结构的差异,准确模仿人类动作一直是机器人控制领域的难题。本文作者基于诺亦腾PN惯性动捕设备,打造一套全新的快速映射算法,将实时采集的穿戴者动作数据,重新定位到机器人各关节结构上,实现穿戴者对机器人动作的实时驱动,以更自然直接的方式完成机器人远程控制。

此外,作者设计了一个复杂手势模仿实验,并基于DTW(Dynamic Time Warping)方法定量评估人与机器人动作差异,验证了该技术的良好性能与可行性。
原文链接:https://www.mdpi.com/1424-8220/22/5/1968/htm
02动捕技术辅助监测驾驶员呼吸频率
韩国 崇实大学
Young-Keun Yoo and Hyun-Chool Shin
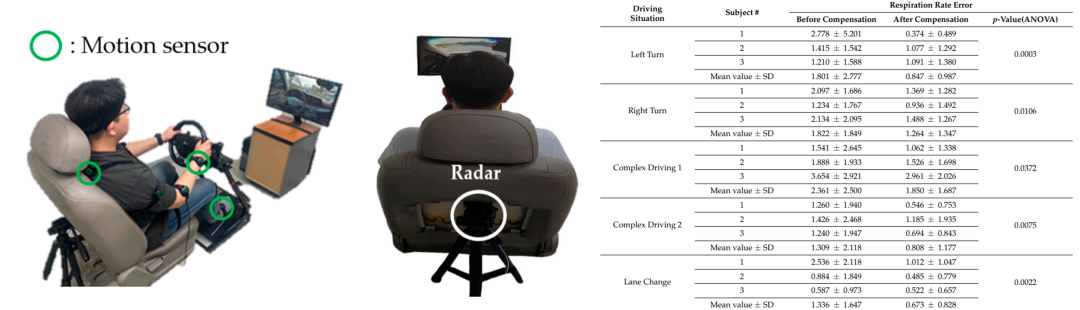
司机呼吸异常是造成交通事故的主要原因之一,FMCW雷达可用于监测司机呼吸状态以预防交通事故,然而司机驾驶时的动作变化会造成雷达信号失真。本文作者将诺亦腾PN Studio惯性动捕系统与FMCW雷达相结合,提出一套全新的驾驶员生命体征监测设备。将诺亦腾PN Studio的传感器放置于司机胸部、腕部、脚部,识别司机动作变化,补偿FMCW失真数据,从而可以更准确地监测司机呼吸状态。作者在直行、转弯等7类常见驾驶场景中验证了该监测设备的准确性。
原文链接:https://www.mdpi.com/2076-3417/12/5/2695
03 动捕技术在数字人体模型中的应用
德国 埃尔朗根-纽伦堡大学
A. Wolf, K. Fackler, M. Reulbach, S. Wartzack and J. Miehling
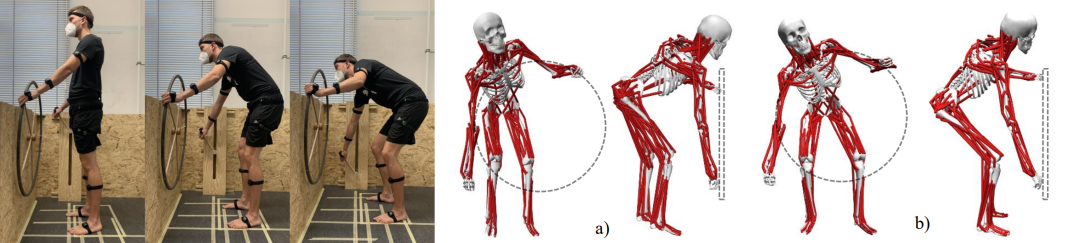
在产品开发阶段,数字人体模型(DHM)常被用于评估产品的可用性、人体工学设计和舒适程度。然而,目前工业设计领域的数字人体模型往往只专注于特定场景,比如工程流水线或车辆内部设计,并不具备普遍适用性。为了解决这个问题,本文作者完成对人机交互方式的分类,并将诺亦腾PN Studio惯性动捕系统、计算机辅助设计(CAD)和肌肉骨骼模拟系统相结合,提出一种数据驱动的多功能交互预测数字人体模型方案。
原文链接:
https://cris.fau.de/converis/portal/publication/276129802?lang=en_GB











